
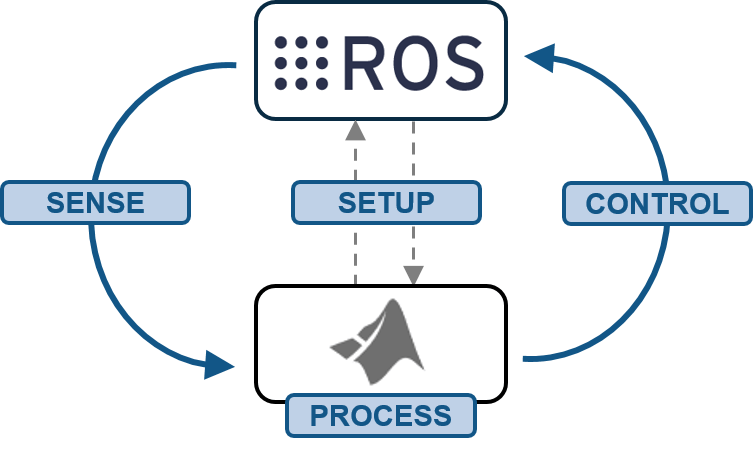
Le nom Robot Operating System peut porter à confusion. En fait, ROS n’est pas un système d’exploitation en soi, comme le sont Windows et Linux par exemple. C’est plutôt un middle-ware, une plateforme qui offre une abstraction pour faciliter l’interaction et la communication entre différents processus qui peuvent être indépendants et même rouler sur des machines différentes. L’idée générale derrière ROS est qu’ils s’agit d’un système distribué. Chaque noeud fonctionne de manière indépendante, mais se rapporte au master, qui coordonne les interactions.
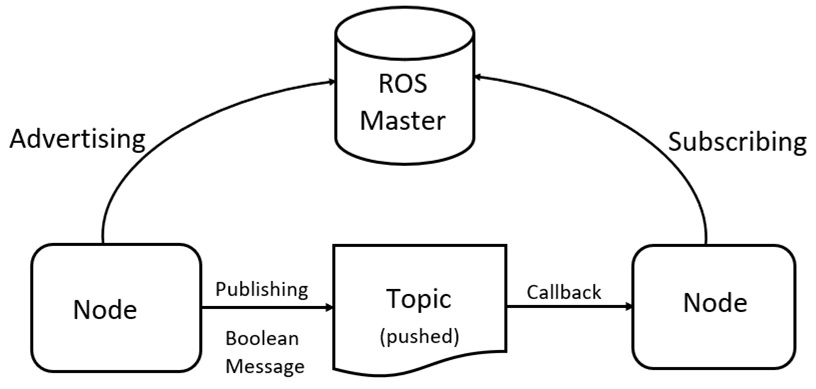
Le master accomplit plusieurs tâches. Il accorde aux noeuds des noms uniques, et garde un registre des canaux de communications entre ceux-ci. Le master met ce registre à la disposition des noeuds, qui sont ensuite capables de communiquer entre eux de manière peer-to-peer une fois qu’un premier contact est établi.
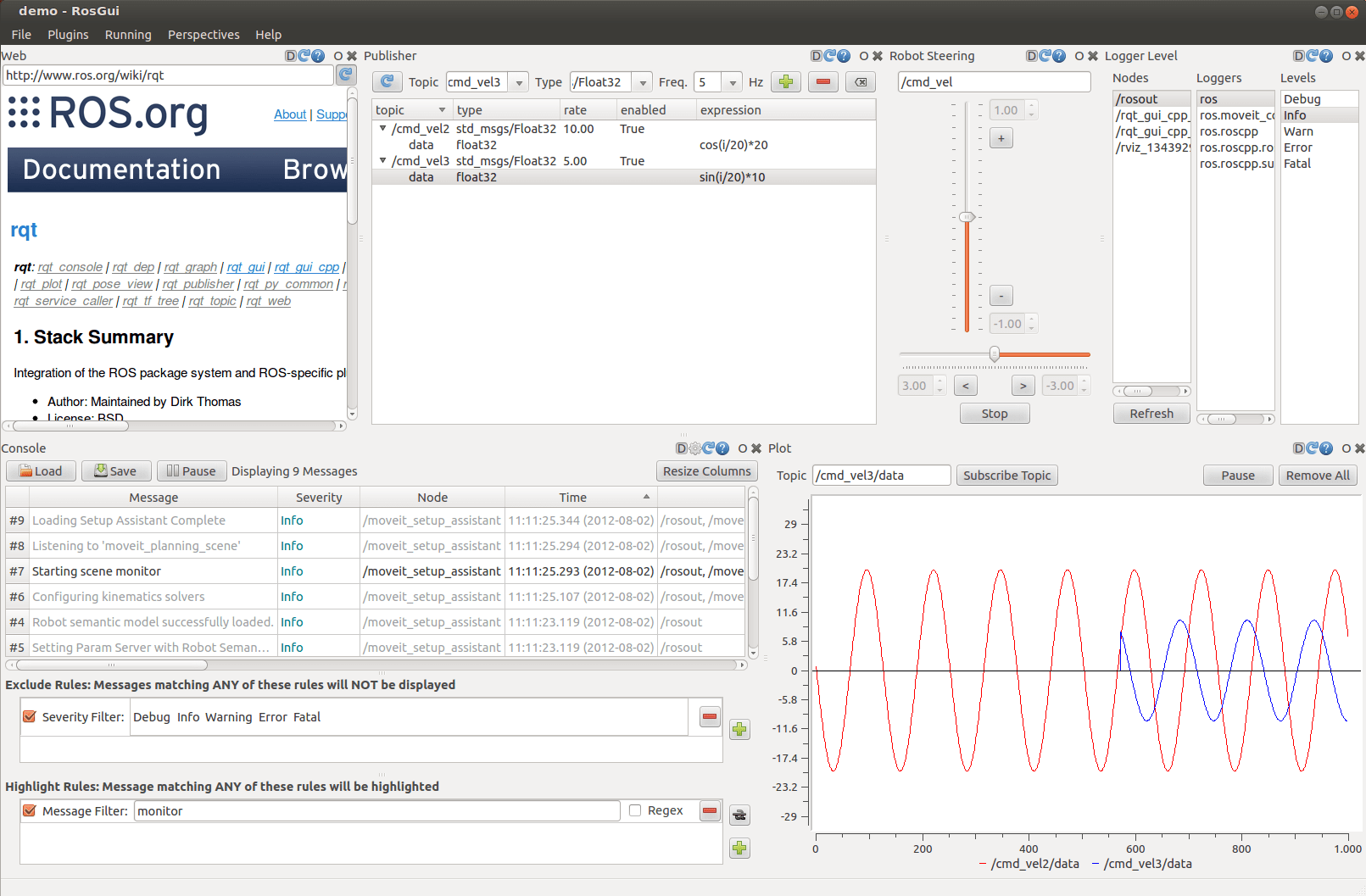
rqt
L’outil rqt est une interface utilisateur modulable. C’est une plateforme qui gère le déploiement de plugins basés sur Qt. Certains plugins de base sont fournis par ROS et il est aussi possible de développer des modules personnalisés.
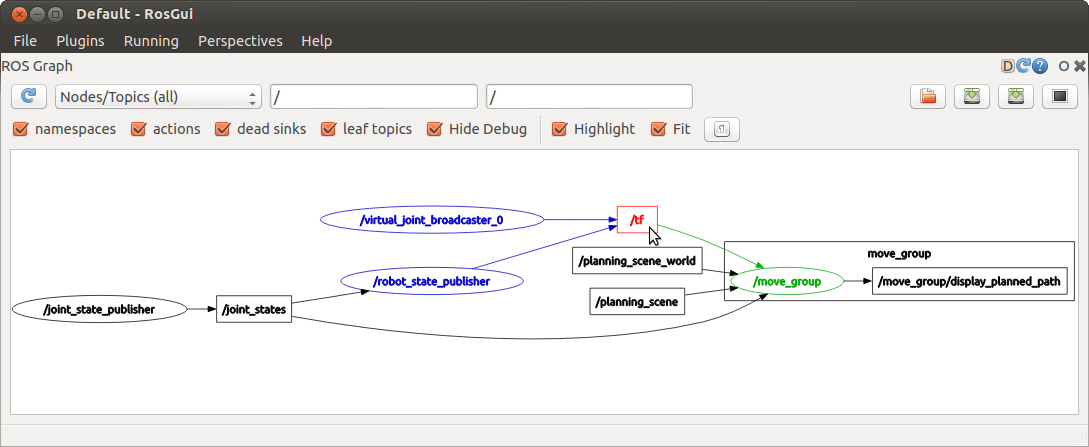
rqt_graph
Un des plugins fournis par ROS qui est très utile est rqt_graph. Il s’agit d’une interface qui permet de visualiser les noeuds actifs ainsi que les transferts d’information entre ceux-ci. C’est un excellent outil pour déboguer un programme ROS et valider son bon fonctionnement.
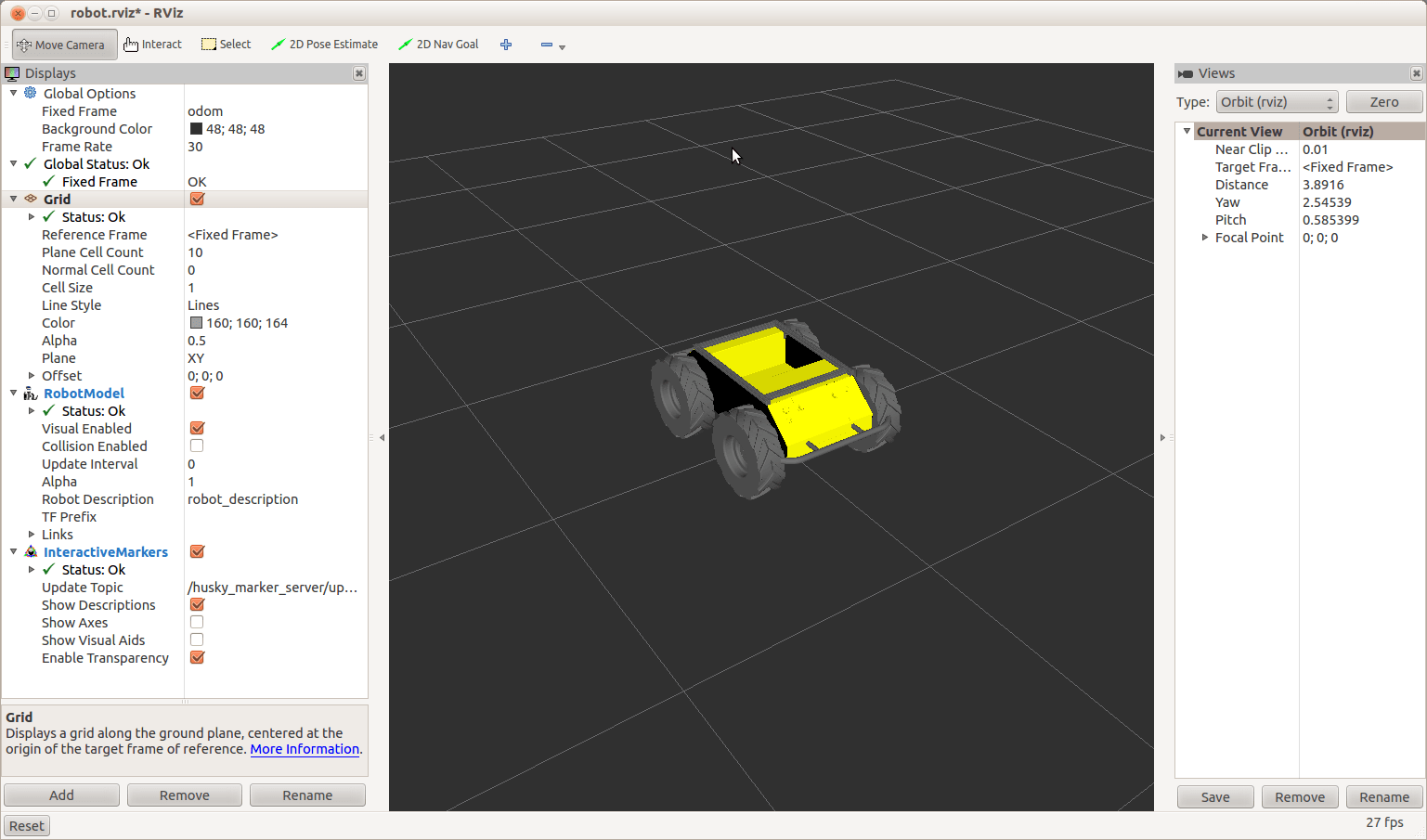
rviz
L’outil rviz (ROS Visualization Tool) est un outil de visualisation 3D très puissant. Il permet de visualiser les données provenant de capteurs, qu’ils soient réels ou simulés, ainsi que le modèle du robot lui-même. Ceci est très utile pour comprendre le comportement du robot selon ce qu’il voit à travers ses capteurs. Par exemple, on peut voir en temps réel des points détectés par un LIDAR en 3D et valider que les actions du robot respectent le comportement désiré.

Gazebo
Gazebo, pour sa part, est un simulateur. Il permet de créer des modèles de robots ainsi que des scénarios et des environnements réalistes qui respectent les lois de la physique. Il est également possible de simuler tous types de capteurs. C’est un outil idéal pour tester ses algorithmes avant de les déployer sur un robot réel.
Bien que ROS soit extrêmement utile pour le développement de systèmes robotiques, il peut aussi être difficile à maîtriser au départ. Son utilisation nécessite certainement de bonnes connaissances de base du système d’exploitation Linux, puis, idéalement, des bases du fonctionnement de systèmes réseau. Heureusement, le wiki et les tutoriels offerts sont assez utiles. Et bien sûr, comme pour tout logiciel, il y a aussi beaucoup de ressources disponibles en ligne. J’espère que cet article vous a permis de mieux comprendre ce qu’est ROS et comment il fonctionne. Si les projets de Robotique UdeS vous intéressent, ou si vous voulez simplement discuter de robotique, n’hésitez pas à nous contacter, nous sommes toujours ouverts à de nouveaux défis!