
Zeus V0 : Un premier prototype fonctionnel
L’équipe de projet de fin de baccalauréat en robotique, Zeus, est composée de 10 finissants en génie de l’Université de Sherbrooke. Notre objectif est de construire un astromobile (Rover) dans le but de participer à la Canadian International Rover Challenge.
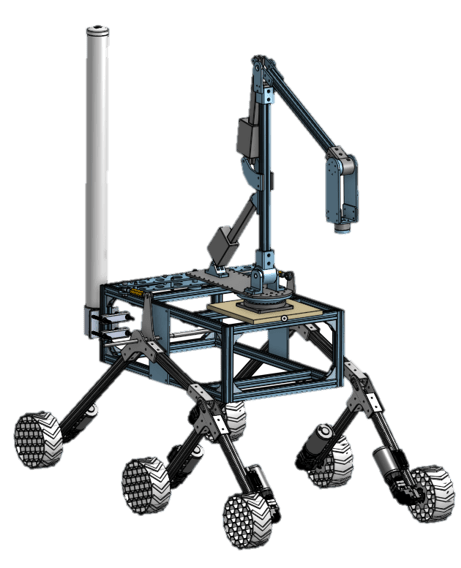
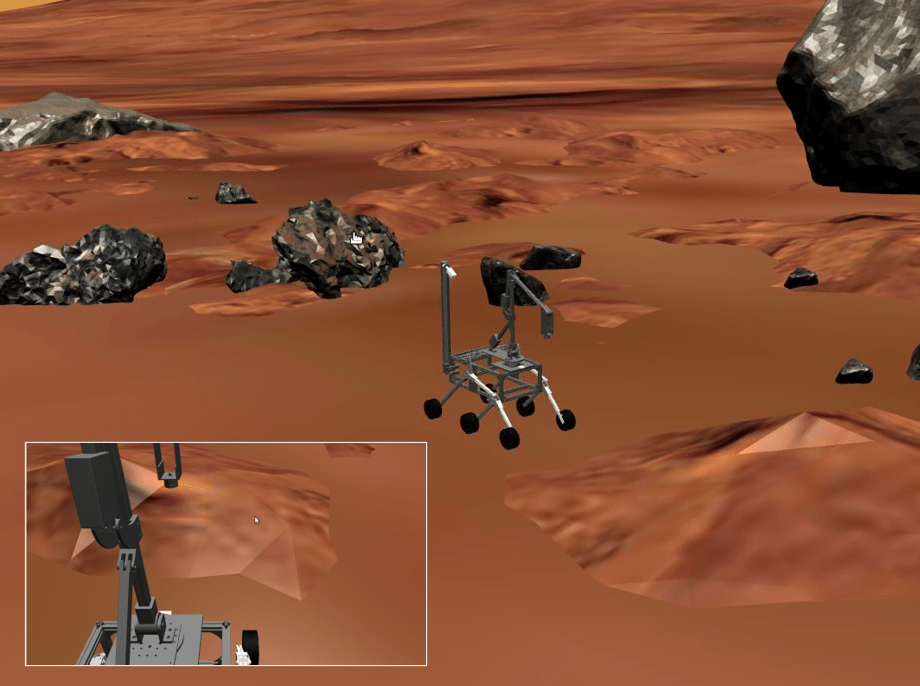
À ce jour, l’équipe de Zeus est fière de présenter son premier prototype fonctionnel! Les prochaines étapes seront de travailler sur une version plus robuste pour faire des tests plus exhaustifs, et ainsi avoir un Rover prêt pour la compétition au mois d’août. À la suite de la compétition, nous améliorerons davantage notre Rover et le présenterons à l’Expo MegaGénial de la faculté de génie.
Ultimement, l’équipe de Zeus désire assurer la continuité du projet en le léguant aux nouvelles cohortes de Robotique UdeS. En plus de laisser son Rover aux nouveaux étudiants, Zeus prévoit aussi diffuser toute sa démarche de conception. Le but est de transmettre les connaissances acquises durant le projet et d’encourager des futurs ingénieurs et ingénieures qui voudraient entreprendre des projets semblables.
La conception d’un rover est un défi d’ingénierie de taille. Un rover est un système robotique complexe, qui englobe plusieurs domaines, soient la mécanique, l’électrique et l’informatique. Afin de répartir la charge de travail parmi notre équipe multidisciplinaire, nous avons divisé le rover en plusieurs modules. Cette manière de procéder s’est avérée très efficace, nous permettant de travailler en parallèle selon nos expertises. Cependant, il ne faut pas négliger le travail d’intégration qui doit être fait afin de s’assurer que toutes les composantes interagissent de manière harmonieuse. C’est pour cette raison que nous nous sommes fixé plusieurs jalons. Cette démarche itérative nous permet d’avoir des versions complètes du rover périodiquement et de confirmer que les systèmes fonctionnent bien ensemble. Voici les modules qui composent notre rover: Le châssis, la propulsion, le bras, la puissance, le contrôle et les sciences. Dans cet article, nous présentons le rôle de chaque module ainsi que son état actuel à notre V0.
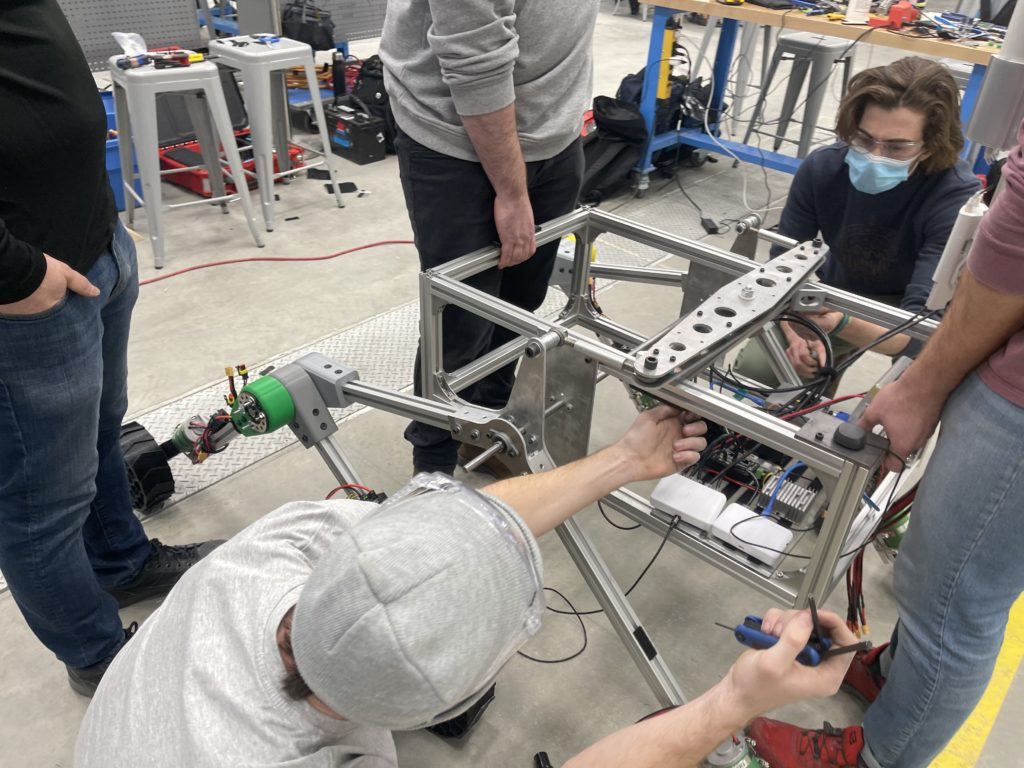
Châssis
Le châssis est le module qui joue en quelque sorte le rôle de squelette du rover, car c’est lui qui contient tous les autres modules en plus de jouer un rôle structurel important. Pour cette version-ci du châssis, la structure a été construite à l’aide d’extrusions d’aluminium. Ce choix apporte comme avantages de bonnes propriétés mécaniques telles que la rigidité ainsi qu’une simplicité à y intégrer les autres modules. Pour les versions subséquentes du rover, l’équipe va miser sur un design qui optimisera la légèreté du châssis en changeant sa géométrie ainsi que les matériaux qui le composent.
Propulsion
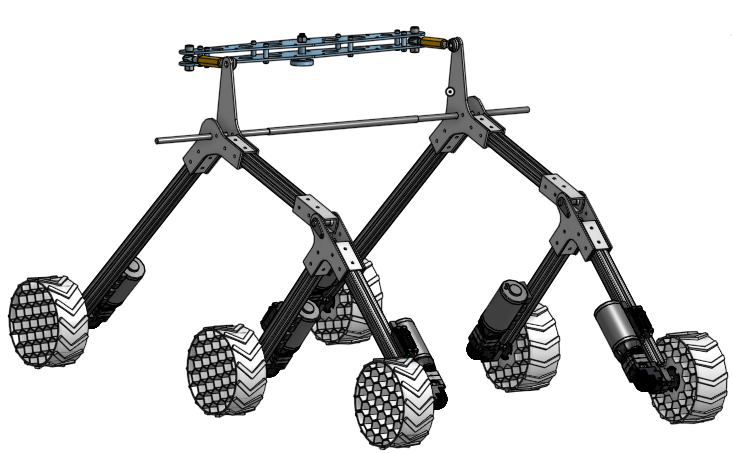
Le module propulsion permet au rover de se déplacer et de traverser des obstacles. La propulsion contient un différentiel, une suspension, des roues et des moteurs. La suspension et le différentiel forment un mécanisme rocker-bogie similaire à celui du rover Persévérance récemment envoyé sur Mars par la NASA. Cette suspension permet alors au rover de surmonter des obstacles de 50 cm tout en gardant un contact au sol optimal pour chacune des roues. On cherche à innover au niveau des roues en créant nos propres roues imprimées 3D, déformables et en forme de nid d’abeilles. Les roues, sans air, sont alors insensibles aux crevaisons et possèdent une très bonne adhérence au sol.
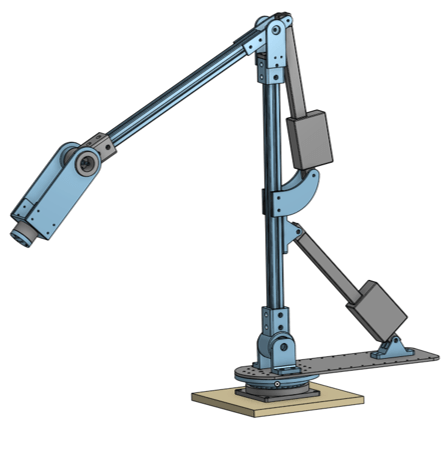
Bras
Afin de réaliser des tâches de dextérité et de manipulation, nous avons doté notre rover d’un bras robotique à 5 degrés de liberté. Ce dernier va permettre de soulever une charge utile allant jusqu’à 3kg tout en manipulant des boutons, des leviers et même des touches de clavier. Des caméras vont être positionnées à des endroits stratégiques sur le bras afin de permettre au pilote de téléguider le bras à distance de manière précise. Pour l’accompagner, une simulation en temps réel sera également à sa disposition pour aider la réalisation des différentes tâches de la compétition.
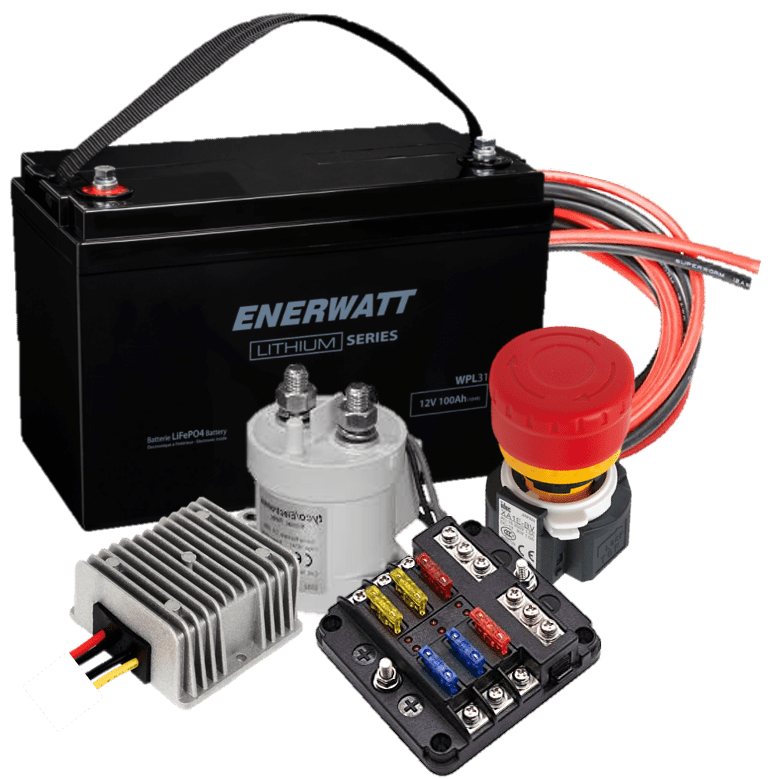
Puissance
Contrôle
Sciences
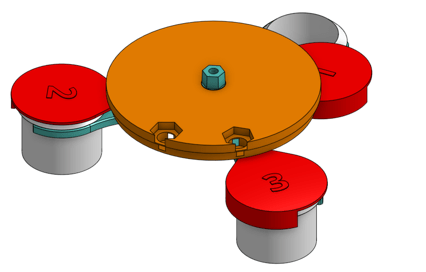
Le module sciences permettra au rover de récolter des échantillons du sol lors de ses missions. Ces échantillons pourront également être analysés une fois le rover revenu à la station de contrôle afin d’étudier leur composition et leurs caractéristiques. Pour accomplir ces tâches, le module sciences aura un mécanisme de prise d’échantillons ainsi qu’un moyen de les stocker. Nous avons exploré plusieurs concepts pour réaliser ce module et un premier prototype est encore en développement.
