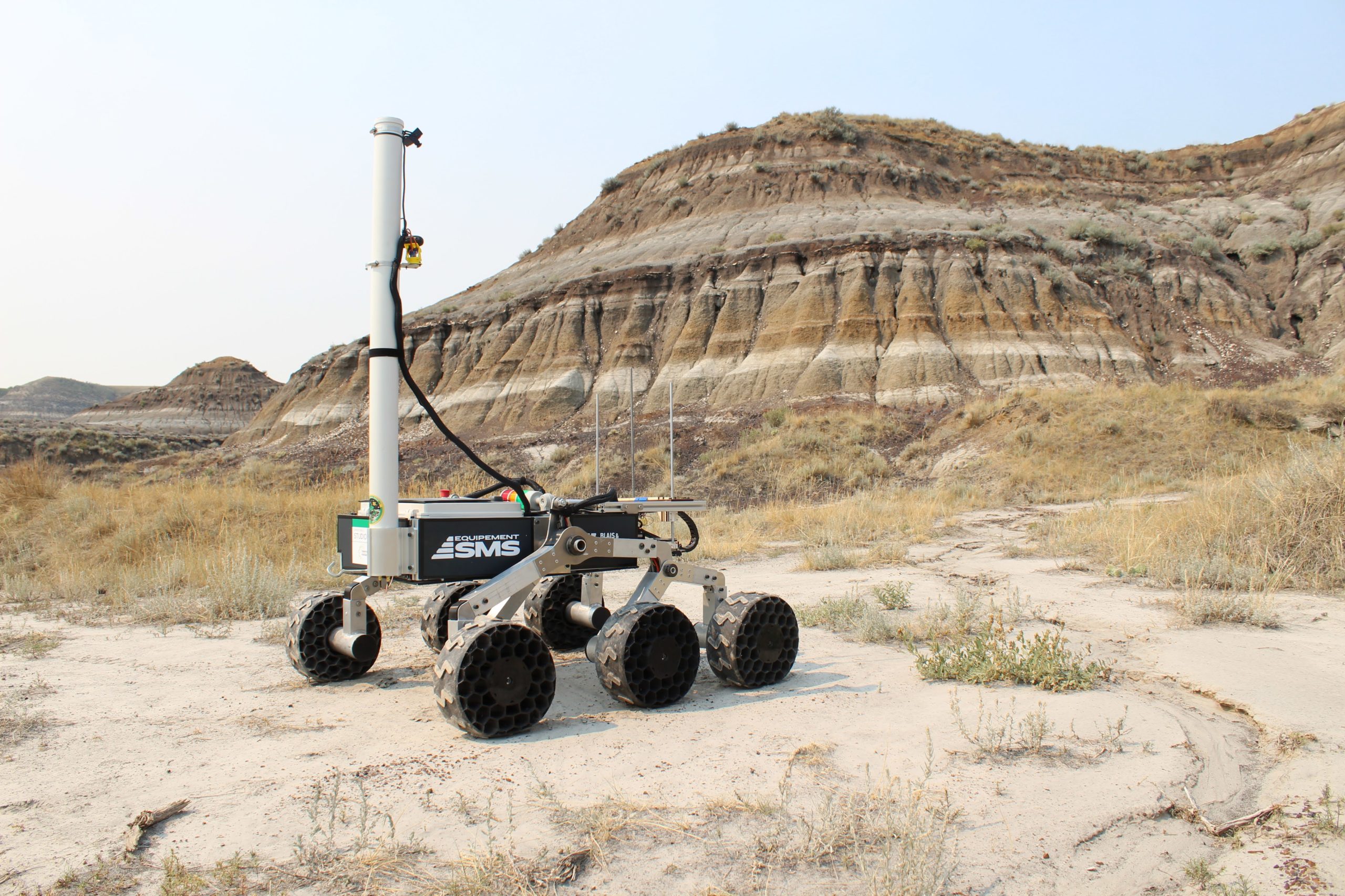
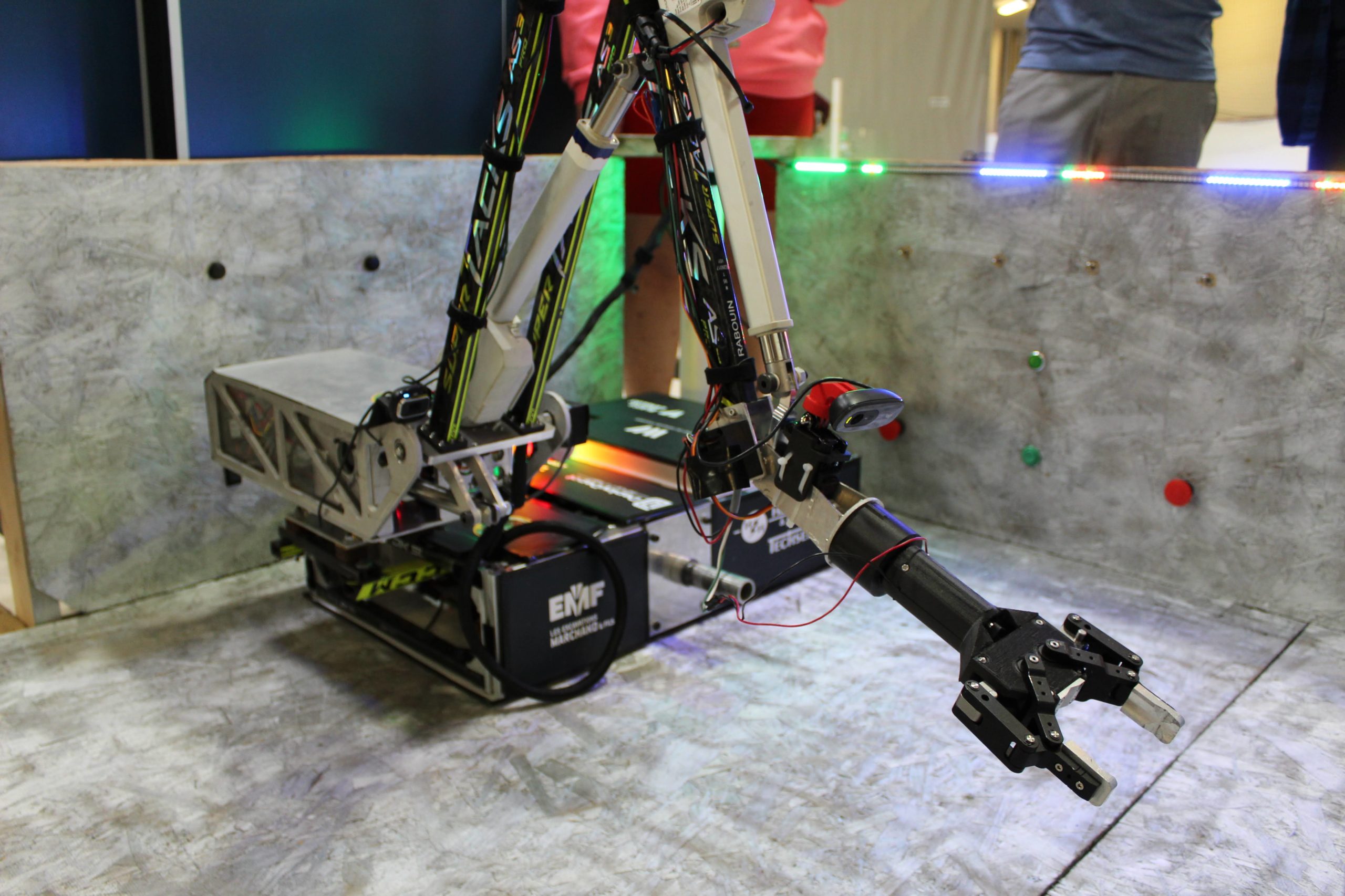
 Zeus est un projet technique qui vise à concevoir un rover, véhicule spatial tout terrain. Ce rover participera à la compétition University Rover Challenge aux côtés de 35 autres équipes de partout dans le monde.
Zeus est un projet technique qui vise à concevoir un rover, véhicule spatial tout terrain. Ce rover participera à la compétition University Rover Challenge aux côtés de 35 autres équipes de partout dans le monde.
Dans le cadre du projet majeur de conception, qui a lieu en fin de baccalauréat à l’Université de Sherbrooke, dix étudiants de la 64e promotion d’ingénierie travailleront sur ce rover. L’équipe multidisciplinaire est composée de sept finissants en génie robotique et trois en génie électrique. Le projet majeur de conception se veut d’une grande envergure et s’étend sur une année et demie. À la graduation des membres de l’équipe, le projet sera légué à la prochaine promotion d’étudiants, pour que le rover poursuive son évolution et continue à participer à des compétitions.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}