
Bienvenue sur le blog de Robotique UdeS!
Sur cette plateforme, nous partageons les avancements de nos projets, ainsi que certaines connaissances techniques qui pourraient vous intéresser.
Zeus : Retour sur la Canadian International Rover Challenge
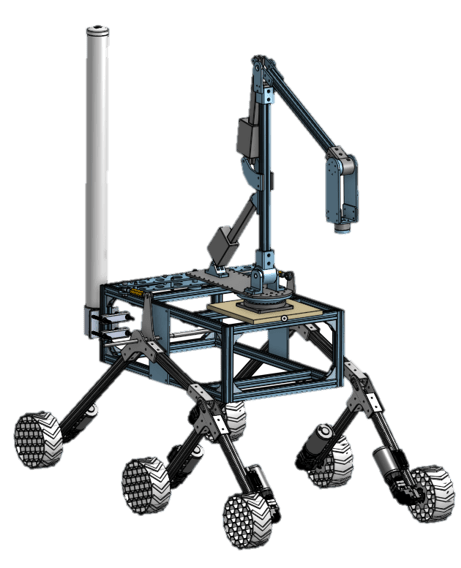
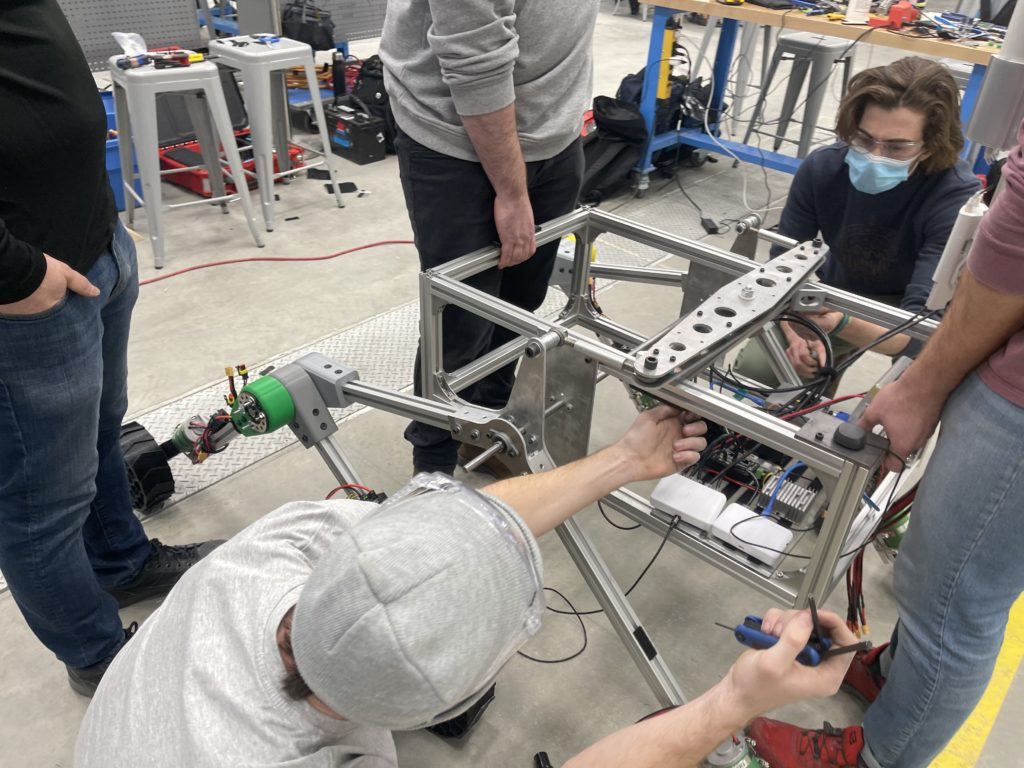
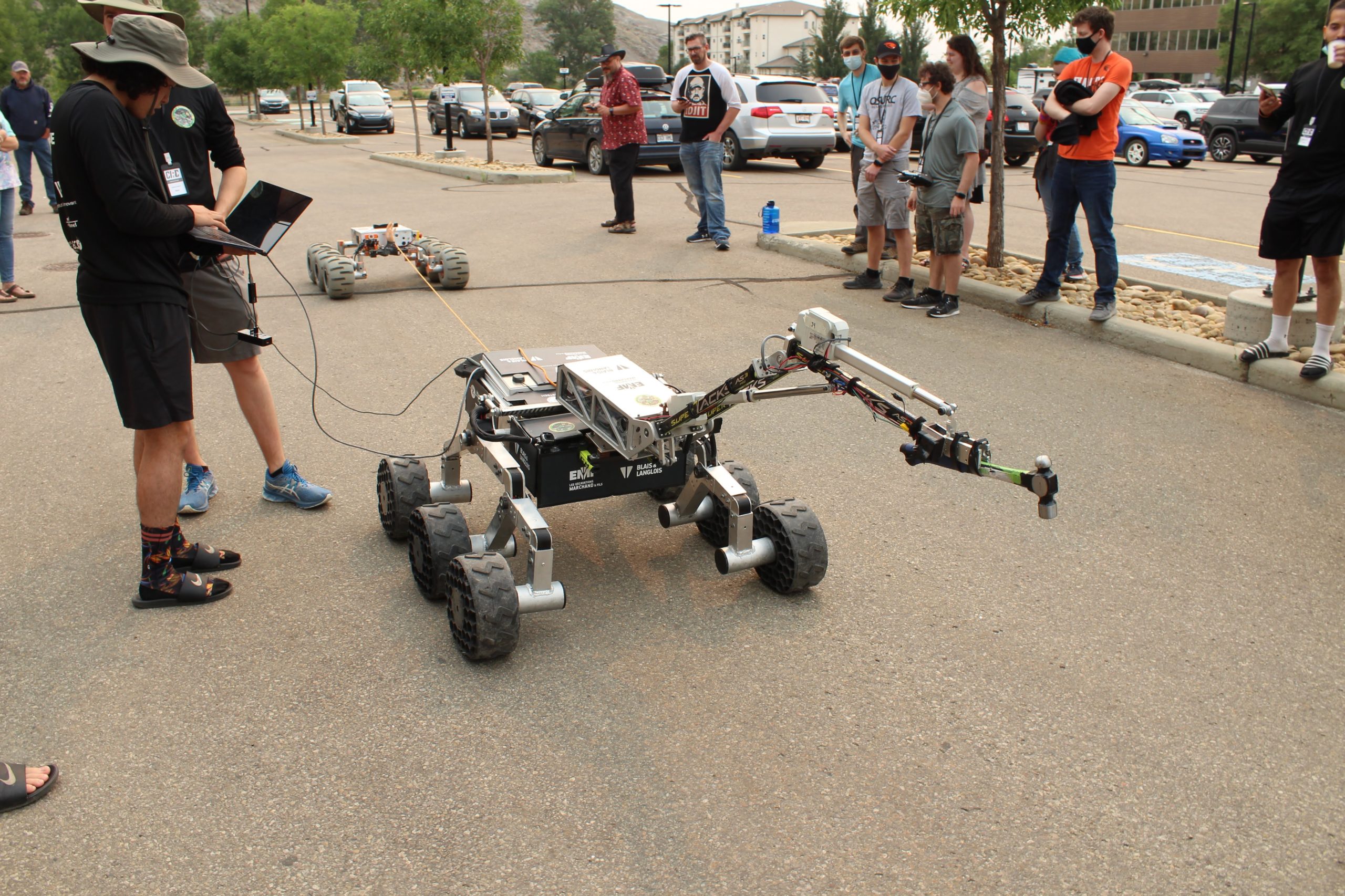
Après plusieurs mois de travail, l’équipe Zeus a réussi à terminer la conception et la fabrication de notre Rover afin de participer à la Canadian International Rover Challenge (CIRC) qui a eu lieu en août dernier. Étant à notre première participation, nous sommes très fiers d’avoir remporté la première place à la compétition. Dans cet article, nous vous décrirons toutes les missions que Zeus a dû compléter et allons discuter de comment ça s’est passé. Pour en apprendre plus sur les origines du projet n’hésitez pas à visiter notre page web, ou bien notre article d’il y a quelques mois.
La compétition
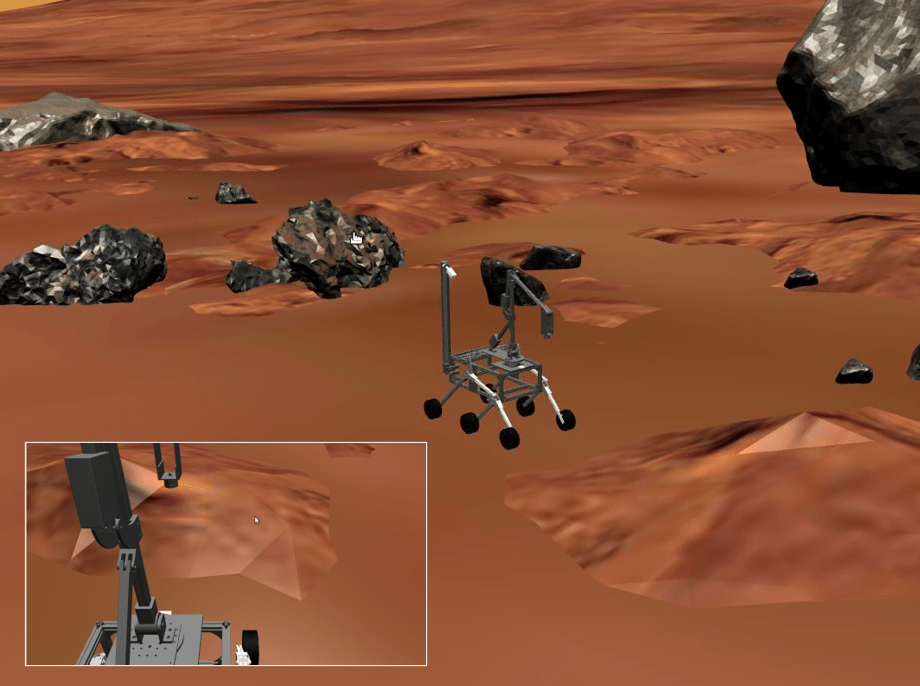
La compétition CIRC était composée de cinq défis que chaque rover devait surmonter. Ces cinq défis visaient à évaluer des aspects variés du rover, soient leur capacité à surmonter des obstacles, la dextérité du bras robotique, la robustesse des systèmes de téléopération, et bien d’autres. Chaque mission avait une mise en situation particulière et devait être complétée en téléopérant le rover à distance à partir d’une base.
Search and Rescue
Suite à un accident qui a atteint un réacteur nucléaire durant la nuit, un astronaute se retrouve blessé près des installations. Comme la radioactivité est élevée, personne ne peut aller l’aider, il faut donc envoyer un rover en mission de secours!





Cette mission a été très excitante. En plus de devoir accrocher l’astronaute, le tirer, et vérifier l’état des lieux, tout devait être fait dans le noir. C’était un bon défi pour nos systèmes de téléopération. Nous avions quatre caméras et deux lumières, qui nous ont permis de bien observer l’environnement du rover tout au long de la mission. Le système de propulsion a également très bien relevé le défi de tirer l’astronaute, qui représentait une charge d’environ 30 kg.
Traversal
Les réacteurs nucléaires des installations martiennes ont besoin d’inspections fréquentes. Afin de vérifier que tout fonctionne bien, un rover est envoyé périodiquement pour les surveiller. Les coordonnées des réacteurs sont connues, et leur état doit être vérifié en lisant les codes Aruco qu’on y retrouve.


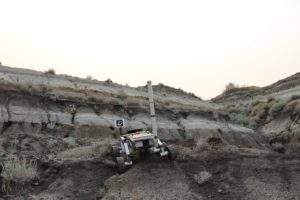

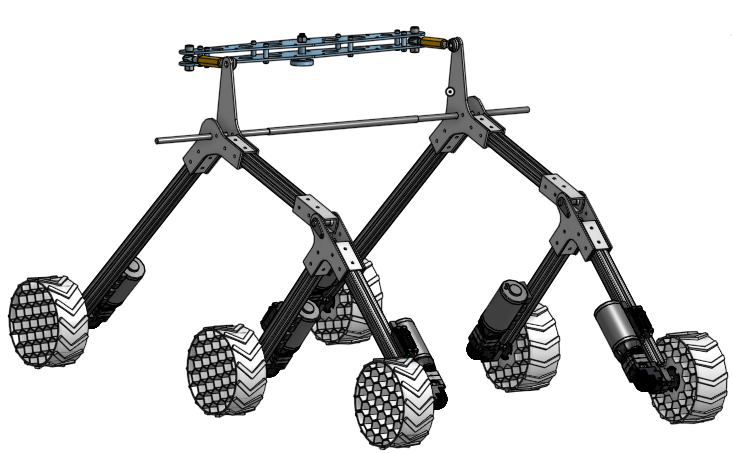
Cette mission nécessitait de voyager à des points GPS connus et de scanner des codes Aruco une fois arrivés à chaque destination. De plus, le terrain était de plus en plus accidenté au fur et à mesure que nous avancions dans le parcours. Nous étions très contents de notre suspension robuste et notre système de téléopération, qui nous ont permis de compléter cette mission dans un temps record de 16 minutes!
Land Speculation
Suite à un accident dans une des installations martiennes, un nouvel endroit pour installer une base spatiale doit être identifié en urgence. Pour ce faire, un rover est envoyé pour explorer les terrains à proximité pour évaluer la viabilité de s’y installer. Le rover doit prendre des photos, sauvegarder les coordonnées des endroits visités, et même prendre des échantillons du sol qui devront être analysés une fois revenu de sa mission. Un rapport de recommandations doit être généré en urgence pour prendre action sur les nouvelles installations à bâtir.







Cette mission a été très intéressante car nous avions plus de liberté que dans les autres. Il n’y avait pas d’actions précises à poser, nous étions libres de choisir une stratégie pour l’exploration et le choix d’emplacement. Notre système de caméras pour prendre des photos ainsi que notre système d’échantillonage de sol ont été très utiles durant la mission. Nous avons réussi à fournir un rapport complet de nos analyses en seulement trois heures et avons trouvé des bons endroits pour des nouvelles installations martiennes.
Arm Dexterity
Une défaillance d’équipement met en danger la stabilité d’un réacteur nucléaire. Ainsi, une réparations doit être faite immédiatement à l’aide d’un rover qui se trouve sur place pour ce genre de situation. Il faut téléopérer le bras du rover à distance afin de compléter la réparation. Par contre, le pilote du rover ne connaît pas bien les systèmes qu’il doit réparer. Il doit donc communiquer avec un expert qui le guide dans la réparation.




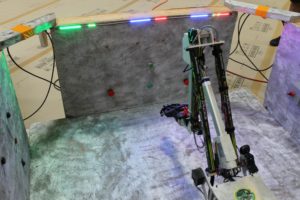
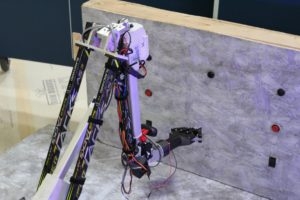
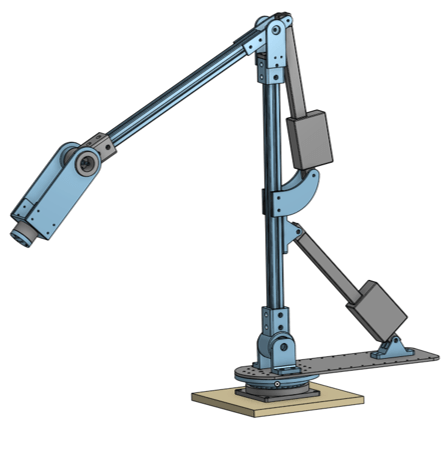
Cette tâche a vraiment mis à l’épreuve notre bras robotique et son sytème de téléopération. Les manipulations à faire sur le panneau de contrôle demandaient des mouvements très précis, et notre pilote a très bien relevé le défi. Nous avons réussi à compléter presque toutes les réparations à faire et avons obtenu un excellent score pour cette épreuve.
Pontifex Perplexus
Les systèmes de refroidissement des installations martiennes ont subi d’importants dommages à la suite de l’explosion d’un réacteur, et le manque de contrôle climatique entrave sérieusement les efforts de réparation. Un rover doit enquêter dans la zone, rechercher des indices et des matériaux et réparer les systèmes défectueux.


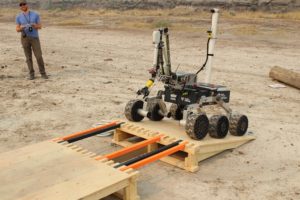



Cette tâche a été très intéressante. Contrairement aux autres tâches, qui duraient une heure chacune, celle-ci durait trois heures et demandait d’effectuer plusieurs réparations. D’abord, il fallait retrouver des guides de maintenance et réussir à les lire avec les caméras du rover. Ceux-ci étaient éparpillés un peu partout sur le terrain de la mission. Ensuite, en suivant les instructions, nous devions compléter les réparations nécessaires. Il y avait beaucoup de défis pour tous les systèmes du rover. Il fallait d’abord construire une passerelle, afin de nous permettre d’accéder au panneu de contrôle pour pouvoir ensuite y réparer le système de refroidissement. Cette mission a été très appréciée par l’équipe et noius sommes très contents de notre performance.
Les Roverlympics
En plus des cinq missions de la compétition, nous avons eu beaucoup de plaisir durant les Roverlympics, compétition amicale qui a eu lieu durant la dernière journée de la CIRC. Il y avait plusieurs défis pour tester les limites des rovers, comme des courses à obstacles, des sauts, une compétition de tir à la corde entre rovers, et bien d’autres. C’était un excellent moyen de clôre la compétition et aussi notre voyage en Alberta!
Une très belle expérience!
Ce projet a été énormément formateur pour nous, et nous avons eu énormément de plaisir en le faisant. Le voyage en Alberta ainsi que la compétition ont également été des expériences incroyables. Nous tenons remercier nos commanditaires ainsi que tous ceux qui ont supporté le projet. Tout cela n’aurait pas être possible sans leur généreuse aide. Par ailleurs, nous sommes toujours à la recherche de contributions afin de compléter le prototype final, et de léguer le prototype au groupe, qui continuera d’aller à la compétition d’année en année!







Pour la session d’automne, nous nous concentrerons sur des améliorations ainsi que la préparation du rover pour l’expo MégaGÉNIALE. Nous aimerions vous inviter à cet évènement, qui est la plus grande exposition de projets de génie au Canada! Plus de 50 projets d’envergure réalisés par les finissantes et finissants dans chacun des domaines du génie seront exposés.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}